
自由锻造四柱油压机控制策略要求:
1、对大惯量活动横梁的控制,既要做到快速和平稳,又要控制精度高,无超调。
2、对锻造过程和液压系统出现的外负载干扰不敏感。
3、根据系统的各种反馈,自动调整控制策略,具有较强的智能。
4、在每分钟较高的行程次数下,控制算法应简单可行,并且实时性强。
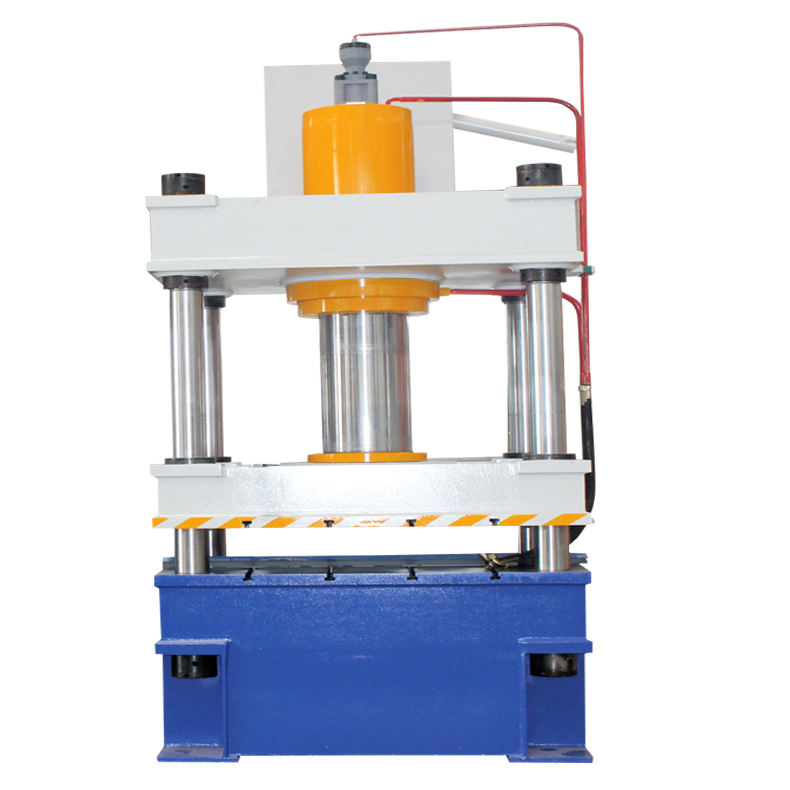
为了提高自由锻造四柱油压机的快速性和平稳性,通常将主缸及回程缸的进油和排油分开控制,多个执行元件同时作用在活动横梁这一负载上,是一个多执行机构系统。
由于负载系统的联结,各个通道的输出及控制相互影响,虽然理论上可以求出控制阀组的等效输入,但必须对各控制阀进行解耦运算,求出单个元件的控制与输出响应。在实际应用中,还涉及到解耦方式的选取、解耦矩阵的确定以及大量的实时矩阵运算。此外,自由锻造液压机液压控制系统是非线性时变系统,存在较大的参数变化和大时变负载干扰,很难构造出一个完善的控制模型,因而用常规的控制方法难以取得理想效果。
根据以上特点,极大地改善了控制效果。但是该模糊控制策略相对简单,对复杂系统控制效果不理想的视场而使得反馈失败。过小则调节时间过长,而PD控制能够很好地协调二者的矛盾。
为了提高自由锻造四柱油压机的快速性和平稳性,通常将主缸及回程缸的进油和排油分开控制,多个执行元件同时作用在活动横梁这一负载上,是一个多执行机构系统。
由于负载系统的联结,各个通道的输出及控制相互影响,虽然理论上可以求出控制阀组的等效输入,但必须对各控制阀进行解耦运算,求出单个元件的控制与输出响应。在实际应用中,还涉及到解耦方式的选取、解耦矩阵的确定以及大量的实时矩阵运算。此外,自由锻造液压机液压控制系统是非线性时变系统,存在较大的参数变化和大时变负载干扰,很难构造出一个完善的控制模型,因而用常规的控制方法难以取得理想效果。
根据以上特点,极大地改善了控制效果。但是该模糊控制策略相对简单,对复杂系统控制效果不理想的视场而使得反馈失败。过小则调节时间过长,而PD控制能够很好地协调二者的矛盾。


 在线咨询
在线咨询